Autonomous vehicles, or vehicles that run without human control, have been developed over the past several decades, as early as 1977 and extending to the current date. While early vehicles were slow and sometimes very slow to react, they greatly advanced the research knowledge and provided funding towards further development. From the early years of mechanical feedback systems to modern software integration, the following timeline traces the important events in vehicle autonomy.
1788: James Watt designs the first governor, or speed limiter--a
feedback-control system--for steam engines, but not used in vehicles
until around 1910 (encyclopedia.jrank.org).
1945: Ralph Teetor, a blind inventor and mechanical engineer, invents
modern cruise control out of frustration from being in a car with his
lawyer, who sped up and slowed down constantly while
talking (inventors.about.com).
1958: The Chrysler Corporation Imperial is released and incorporated
Teetor’s cruise control system, which calculated speed from drive shaft rotations and varies throttle position with a solenoid
(experiencefestival.com).
autonomous, intelligent, vehicle. It tracked white street markers and
achieved speeds up to 30 kilometers per hour (tech- faq.com).
1980: Ernst Dickmanns and his group at University Bundeewehr Munich, also known as UniBW, build robot cars using saccadic vision, estimated approaches like Kalman filters, and parallel computers. They went up to 96 kilometers per hour on an empty street (idsia.ch).
1987-1995: The pan-European Prometheus project, also known as the EUREKA Prometheus Project, the largest autonomous vehicle project so far, is funded by the European Commission (cmm.ensmp.frl).
1994: In the final part of the project in Paris, the VaMP and the VITA-
2, created by engineers from the University of the German Federal
Armed Forces in Munich and Mervedes-Benz, drive more than 1000
kilometers in heavy traffic and reach speeds of 130 kilometers per hour.
They used dynamic vision to detect up to twelve other cars and avoid
them as well as control the steering wheel, throttle, and brakes through
a computerized command system that relied on real-time evaluation of
image sequences (fhwa.dot.gov).
1995: Throttle and brakes needs human intervention, but a Mercedes-
Benz model created by UniBW drives from Munich to Copenhagen and
back, more than 1000 autonomous miles on a highway in traffic, and
exceed speeds of 177 kilometers per hour. It completes the journey
with 95% autonomous driving (idsia.ch).
1996-2001: The altered Lancia Thema is created. It is a car created
by the Italian ARGO Project that can follow painted white line marks in a
highway. It achieved an average speed of 90 kilometers per hour at
94% automation and was equipped with two black-and-white video
cameras. They used stereoscopic vision algorithms to follow the path
and sparked worldwide interest and research in the area, including the
DARPA-funded “DEMO” projects that focused on vehicles able to
navigate through off-road environments. They provided the starting
knowledge and experience of automotive robotics
(ftp.utcluj.ro).
2005: DARPA’s American “grand challenge” begins with no traffic and a
few road markers, if necessary, in the desert. The course has 2935 GPS
points and is revealed in advance. The top car, with a max speed of 40
kilometers per hour, to complete the 211 kilometer desert course is the
Volkswagon of Stanford, which finished the course in 6 hours and 54
minutes (thefutureofthings.com).
2007-present: DARPA's "Urban Challenge" won by Carnegie Mellon
University. Sensor systems become more elegant and semi-autonomous
features begin to hit the mainstream with manufacturers from Audi and
Volvo, to GM and Mercedes incorporating features like collision
avoidance, lane recognition, and driver attention assist into their new
vehicle lines (thefutureofthings.com).
Home | Future | RIDE System | Bibliography
 |
| The governor regulated the speed of steam engines _ |
 |
| 1958 Chrysler Imperial sports the first cruise control _ |
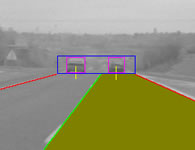 |
Prometheus combined lane segmentation with obs. detection |
 |
The ARGO used stereoscopic vision |
 |
| Stanley (a mod. VW), winner of DARPAs Grand Challenge _ |
 |
Boss (a mod. GM), winner of DARPAs Urban Challenge |